robot end effector interface
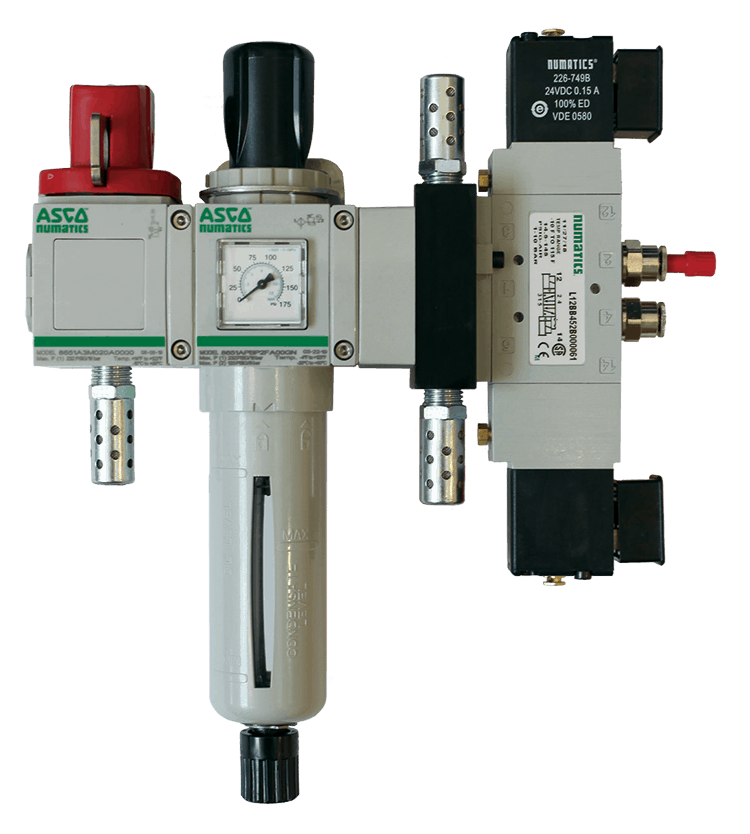
The basic steps for using any end effector with a robot are. Data Sheet ROBOT EE-Interface Endplate Generation 2000 Valve Platforms ROBOT End Effector Interface The Numatics 20052012 2035 series valve manifolds with EE-Interface.

8020 Gimatic Qcy90b Kit For Universal Robots Eoat Side
Which electriconic print and where is it situated in the cabinet.

. Human-Robot Interface for end effectors 161 4. Attach any power connections eg. Explore Mecademics range of end effectors and EAOT accessories.
System of the driveline All actuators are connected to the active joints by the Nylon-Kevlar wire. It provides services and topics specific to the End Effector Panel in order to be. A tool changer rotatable about a longitudinal axis and having a socket on the longitudinal axis with means for clamping a tool in.
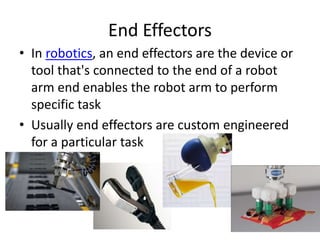
The end effector is the part of the robot that interacts with the. The correct end effector is key to successfully integrating a robot into a process. The objective of this study was to investigate the efficacy of an Electroencephalography EEG-based Motor Imagery MI Brain-Computer Interface BCI.
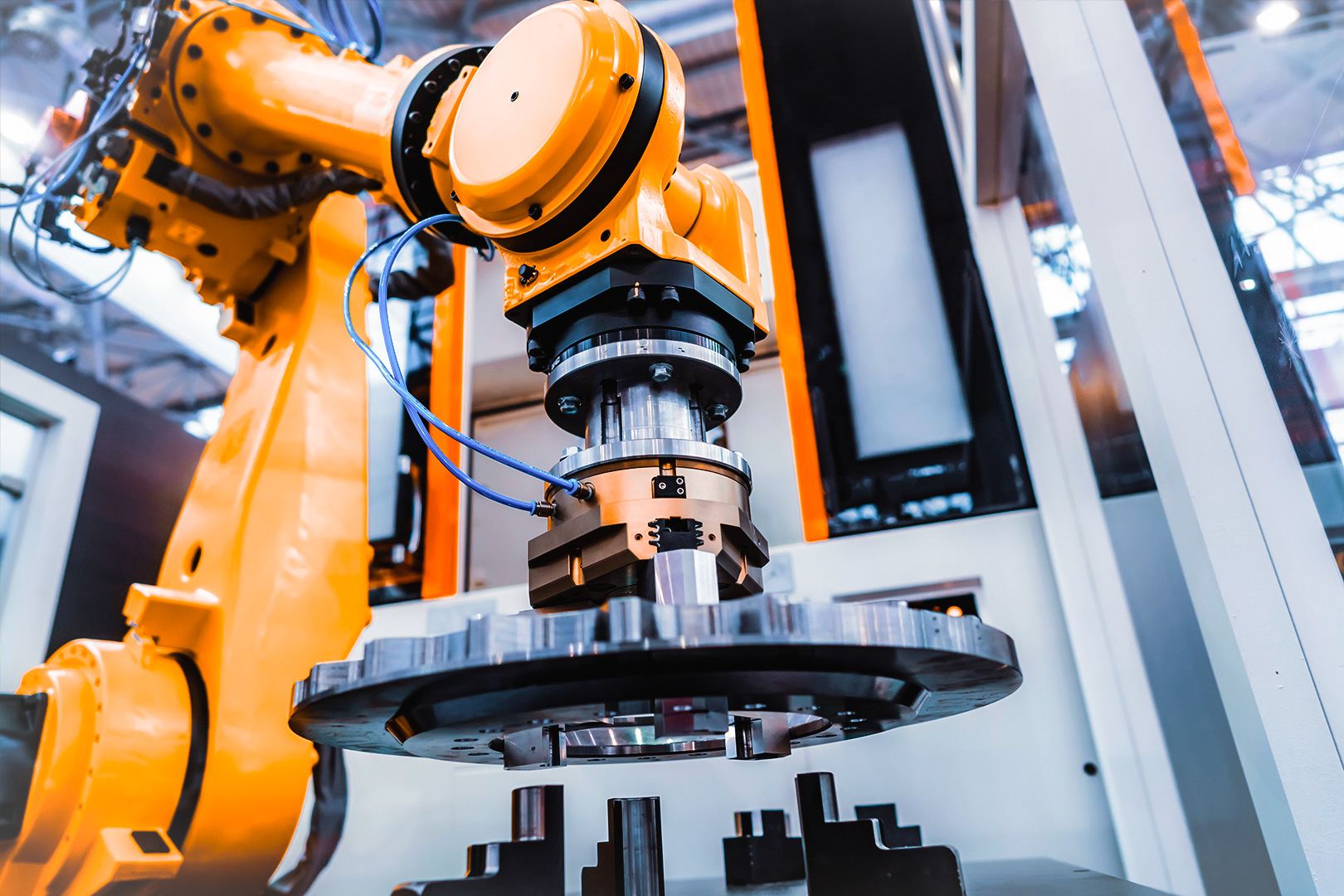
The same kind of tendons are used to. Up to 3 cash back ROBOTEND EFFECTOR INTERFACE Physical support during the work cycle Achieved by the mechanical connection between the end effector and robot wrist. Attach any power connections eg.
In a R30iA-cabinet where is the end effector interface connected to. Blueprint Bravo External End-Effector Interface Offers a versatile interface for Bravo manipulators Features 2 x 3mm dowel pin holes for accurate alignment Allows attachment of external. Physically mount the end effector onto the robots wrist.
A tool interface for a robot end effector comprising. In robotics an end effector is a device or tool thats connected to the end of a robot arm where the hand would be. End Effector Interface This package handles the End Effector Panel of a robot it is supported from Ned 2.
Discover our MEGP 25 electric parallel gripper and pneumatic module. However a custom end effector can be costly and time consuming to design and integrate. Human-Robot Interface for End Effectors.
Physically mount the end effector onto the robots or cobots wrist. The basic steps for using any end effector with a robot are. The haptic knob HK robot is a two-degree-of-freedom robotic hand interface for hand grasping and knob manipulation PP Lambercy et al 2007 2011.
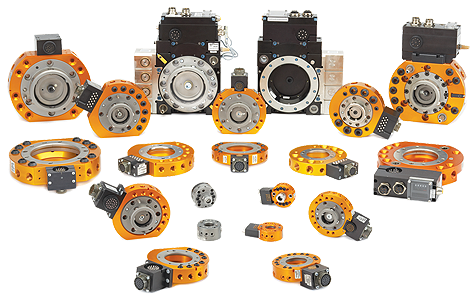
Robot Arm End Effectors.

Design Of A Force Controlled End Effector With Low Inertia Effect For Robotic Polishing Using Macro Mini Robot Approach Sciencedirect
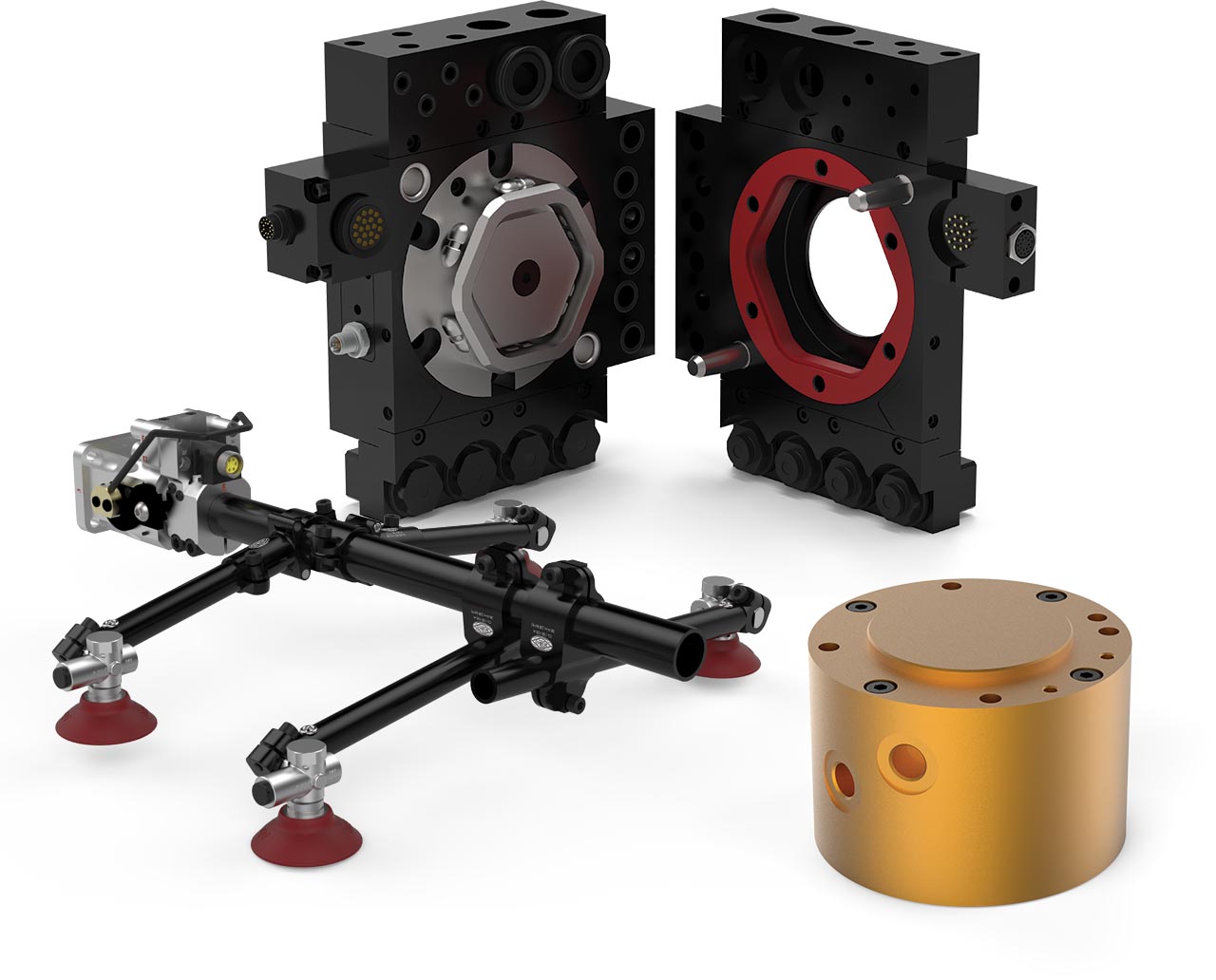
Ati Industrial Automation Automatic Robotic Tool Changers
Robotics And Autoamtion Manipulators Actuators And End Effectors
How To Program Any End Effector With Robodk Robodk Blog

Fanuc S420 Ro Connection Diy Robotics Help Center
End Effector Control Kit Cross Robotic Automation
Bodybuilder End Effector Heavy Duty Mid Mounts Series

Cobotta Collaborative Robot Denso Edquip

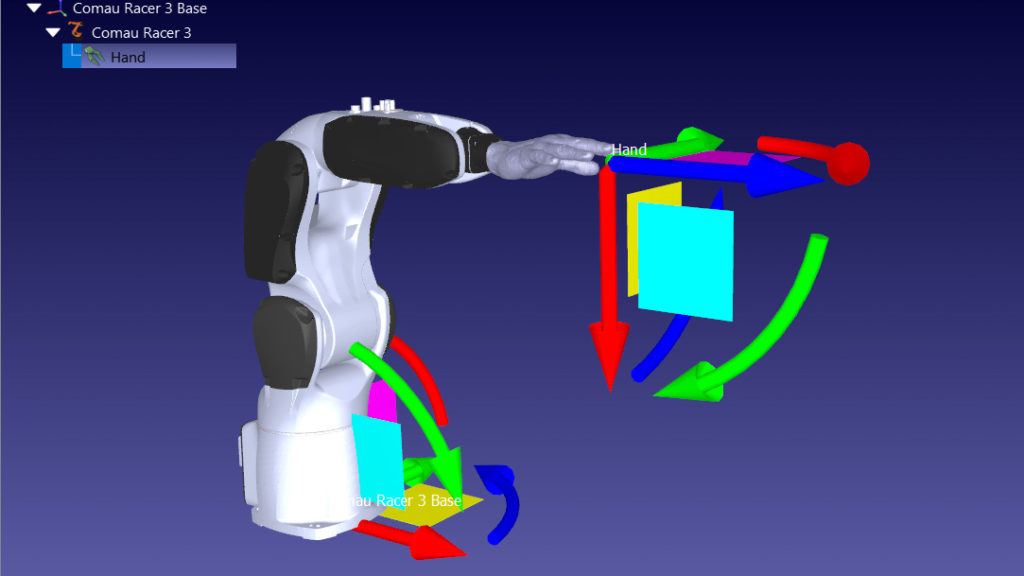
Robot Model And Robot State Moveit Tutorials Kinetic Documentation

New Ipr Greifer Ec 4 5r 15030575 Robot Endeffector Power Signal Interface P4496 Ebay

Robotic Extrusion 6 Axis Kuka Abs 3d Printing On Behance

Showing Left Modified End Effector Of The Baxter Robot With A Download Scientific Diagram
How To Program Any End Effector With Robodk Robodk Blog
Robotic Tooling Function

Robot End Effectors I2i Engineering

End Effector An Overview Sciencedirect Topics

Robot End Effector Definition And Examples

Pin On 3d Design Drawings
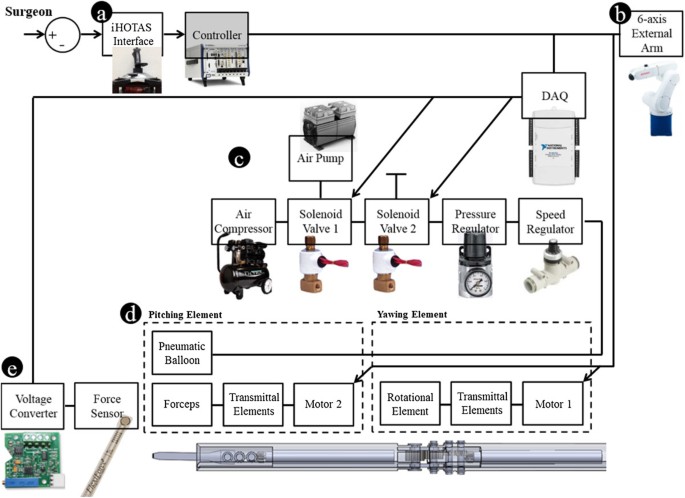
Pneumatic Type Surgical Robot End Effector For Laparoscopic Surgical Operation By Wire Biomedical Engineering Online Full Text